Chip RISC V CPU: Physical tape out in a Jupyter notebook on ExamScale Cluster
Motivated by difficulty experiences in IC Design about 18 and 8 years ago, this note will save time and resource for next generation Electronics Engineering and Computer Science who are interested in digital and mixed-signal integrate circuit. If I could persuade you to rethink about Open Source tools for real-world digital/analog chip design and tape out for manufacture efabless University program efabless.com
1
2
3
4
# $
from IPython import display
display.Image("https://efabless.com/lib_CUsguFEVafmoKCKW/klx999yu9pesnun9.png")
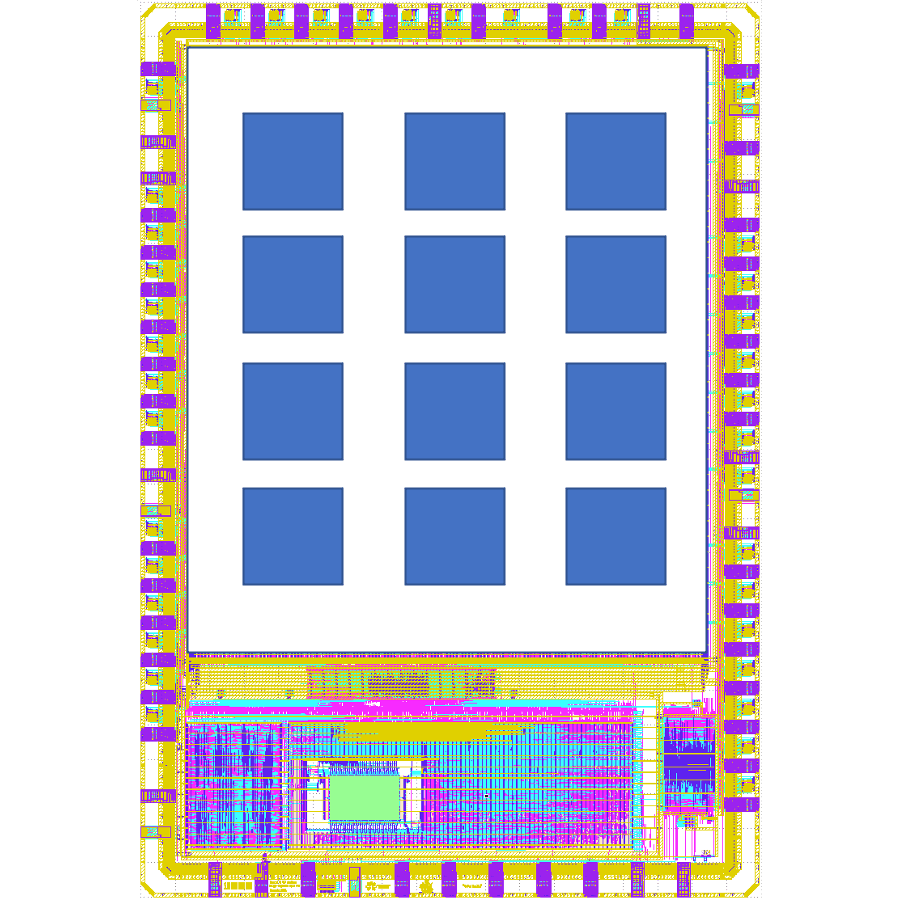
Figure: Multi-project-wafer at efabless.com
It might be four breakthroughs in open source IC design and tape out chip layout to fabricate at chip manufacture.
OpenROAD Project:: Open source tools for complete and complex IC design processes. Compare to commercial tools, OpenLane based on OpenROAD can be applied to Automatic IC design flow which can reduce human interaction for less than 24 hours turn around time from Register Transfer Lever (RTL) to Layout tape process, GDS file.[1]
Open Sky130 PDK, SkyWater Open Source PDK is a collaboration between Google and SkyWater Technology Foundry to provide a fully open source Process Design Kit and related resources, which can be used to create manufacturable designs at SkyWater’s facility. [2]
Muti-project-wafer or MPW, began 1981 Metal Oxide Silicon Implementation Service), established by DARPA as a technical and human infrastructure for VLSI[3], many university course the course produced ‘multi-university, multi-project chip-design demonstration had been ended. New for opportunity for Open chip for university project has been started by Efabless with Skywater and Google partners. [4]
High Performance Computing for CAD/CAM as we create chip layout rendering is a time-consuming task and sometimes lead to failure of project delivery. With GPU, it is not only speed we will achieve, but flexibility in programming is also countless. [5]
This post will demonstration how to work out on IC design flow from RTL to GDS tape out as shown in following diagram.
1
2
from IPython import display
display.Image("https://antmicro.com/blog/images/openlane-flow.png")
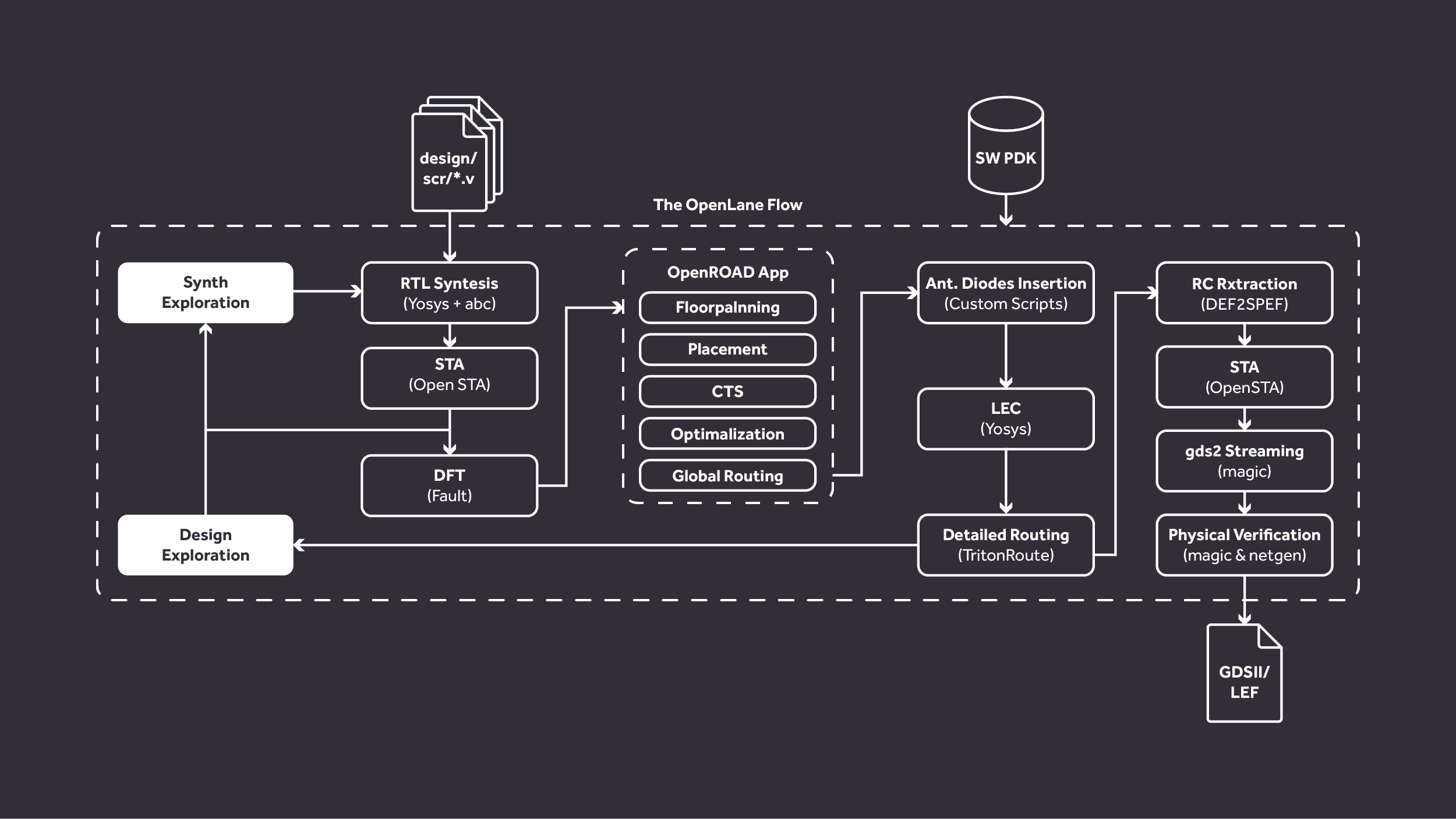
Source[Antmicro · Improving the OpenLane ASIC build flow with open source SystemVerilog support]
We will demonstrate how to generate physical IC layout design from Verilog RTL for RISC V CPU, named as Picorv32a[6]
Step 0: Prepare Environment and Download EDA
Before start jupyter notebook, on any head node, login node
$conda create –name chipREal
$conda activate chipReal
$ mkdir chip_design_tape_out
$ cd chip_design_tape_out
$ git clone –depth=1 https://github.com/The-OpenROAD-Project/OpenLane
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
%%writefile environment.yml
channels:
- litex-hub
- conda-forge
dependencies:
- open_pdks.sky130A
- magic
- ngspice-lib
- gdstk
- python
- pip
- openroad
- netgen
- yosys
- tcllib
- pyyaml
- click
- pip:
- cairosvg
- pyspice
In bash shell not jupyter notebook Update conda environment:
$ conda env update –file environment.yml
Step 1: Prepare Makefile and env.py, from Docker to Singularity
On ExScale we cannot use Docker so we need to chagne defualt configuration to Singularity configuration in Makefile.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
%%writefile OpenLane/Makefile
# Copyright 2020-2022 Efabless Corporation
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
PYTHON_BIN ?= python3
OPENLANE_DIR ?= $(shell pwd)
DOCKER_OPTIONS = $(shell $(PYTHON_BIN) ./env.py docker-config)
DOCKER_ARCH ?= $(shell $(PYTHON_BIN) ./docker/current_platform.py)
# Allow Configuring Memory Limits
ifneq (,$(DOCKER_SWAP)) # Set to -1 for unlimited
DOCKER_OPTIONS += --memory-swap=$(DOCKER_SWAP)
endif
ifneq (,$(DOCKER_MEMORY))
DOCKER_OPTIONS += --memory=$(DOCKER_MEMORY)
# To verify: cat /sys/fs/cgroup/memory/memory.limit_in_bytes inside the container
endif
# Allow using GUIs
UNAME_S = $(shell uname -s)
ifeq ($(UNAME_S),Linux)
DOCKER_OPTIONS += --env DISPLAY=$(DISPLAY) -B /tmp/.X11-unix:/tmp/.X11-unix -B $(HOME)/.Xauthority:/.Xauthority
ifneq ("$(wildcard $(HOME)/.openroad)","")
DOCKER_OPTIONS += -B $(HOME)/.openroad:/.openroad
endif
endif
THREADS ?= 1
ifneq (,$(ROUTING_CORES))
DOCKER_OPTIONS += --env ROUTING_CORES=$(ROUTING_CORES)
endif
include ./dependencies/image_name.mk
TEST_DESIGN ?= spm
DESIGN_LIST ?= spm
QUICK_RUN_DESIGN ?= spm
BENCHMARK ?= regression_results/benchmark_results/SW_HD.csv
REGRESSION_TAG ?= TEST_SW_HD
FASTEST_TEST_SET_TAG ?= FASTEST_TEST_SET
EXTENDED_TEST_SET_TAG ?= EXTENDED_TEST_SET
PRINT_REM_DESIGNS_TIME ?= 0
SKYWATER_COMMIT ?= $(shell $(PYTHON_BIN) ./dependencies/tool.py sky130 -f commit)
OPEN_PDKS_COMMIT ?= $(shell $(PYTHON_BIN) ./dependencies/tool.py open_pdks -f commit)
export PDK_ROOT ?= ./pdks
export PDK_ROOT := $(shell $(PYTHON_BIN) -c "import os; print(os.path.realpath('$(PDK_ROOT)'), end='')")
PDK_OPTS = -B $(PDK_ROOT):$(PDK_ROOT) --env PDK_ROOT=$(PDK_ROOT)
export PDK ?= sky130A
PDK_OPTS += --env PDK=$(PDK)
ifneq ($(STD_CELL_LIBRARY),)
export STD_CELL_LIBRARY ?= sky130_fd_sc_hd
PDK_OPTS += --env STD_CELL_LIBRARY=$(STD_CELL_LIBRARY)
endif
# ./designs is mounted over ./install so env.tcl is not found inside the Docker
# container if the user had previously installed it.
ENV_START = singularity exec --nv\
-B $(OPENLANE_DIR):/openlane\
-B $(OPENLANE_DIR)/designs:/openlane/install\
$(PDK_OPTS)\
$(STD_CELL_OPTS)\
$(DOCKER_OPTIONS)
#ENV_COMMAND = $(ENV_START) $(OPENLANE_IMAGE_NAME)-$(DOCKER_ARCH)
ENV_COMMAND = $(ENV_START) openlane.sif
ENV_RUN = singularity shell --nv\
-B $(OPENLANE_DIR):/openlane\
-B $(OPENLANE_DIR)/designs:/openlane/install\
$(PDK_OPTS)\
$(STD_CELL_OPTS)\
$(DOCKER_OPTIONS)
ENV_COMMAND_RUN = $(ENV_RUN) openlane.sif
.DEFAULT_GOAL := all
.PHONY: all
all: get-openlane pdk
.PHONY: openlane
openlane: venv/created
@PYTHON_BIN=$(PWD)/venv/bin/$(PYTHON_BIN) $(MAKE) -C docker openlane
.PHONY: openlane-and-push-tools
openlane-and-push-tools: venv/created
@PYTHON_BIN=$(PWD)/venv/bin/$(PYTHON_BIN) BUILD_IF_CANT_PULL=1 BUILD_IF_CANT_PULL_THEN_PUSH=1 $(MAKE) -C docker openlane
pull-openlane:
@singularity pull openlane.sif "docker://$(OPENLANE_IMAGE_NAME)"
get-openlane:
@$(MAKE) pull-openlane || $(MAKE) openlane
.PHONY: mount
mount:
cd $(OPENLANE_DIR) && \
$(ENV_COMMAND_RUN)
.PHONY: pdk
pdk: venv/created
./venv/bin/$(PYTHON_BIN) -m pip install --upgrade --no-cache-dir volare
./venv/bin/volare enable
.PHONY: survey
survey:
$(PYTHON_BIN) ./env.py issue-survey
.PHONY: lint
lint: venv/created
./venv/bin/black --check .
./venv/bin/flake8 .
.PHONY: start-build-env
start-build-env: venv/created
bash -c "bash --rcfile <(cat ~/.bashrc ./venv/bin/activate)"
venv: venv/created
venv/created: ./requirements.txt ./requirements_dev.txt ./requirements_lint.txt ./dependencies/python/precompile_time.txt ./dependencies/python/run_time.txt
rm -rf ./venv
$(PYTHON_BIN) -m venv ./venv
./venv/bin/$(PYTHON_BIN) -m pip install --upgrade --no-cache-dir pip
./venv/bin/$(PYTHON_BIN) -m pip install --upgrade --no-cache-dir -r ./requirements_dev.txt
touch $@
DLTAG=custom_design_List
.PHONY: test_design_list fastest_test_set extended_test_set
fastest_test_set: DESIGN_LIST=$(shell cat ./.github/test_sets/fastest_test_set)
fastest_test_set: DLTAG=$(FASTEST_TEST_SET_TAG)
fastest_test_set: test_design_list
extended_test_set: DESIGN_LIST=$(shell cat ./.github/test_sets/extended_test_set)
extended_test_set: DLTAG=$(EXTENDED_TEST_SET_TAG)
extended_test_set: test_design_list
test_design_list:
cd $(OPENLANE_DIR) && \
$(ENV_COMMAND) sh -c "\
python3 run_designs.py\
--tag $(DLTAG)\
--threads $(THREADS)\
--print_rem $(PRINT_REM_DESIGNS_TIME)\
--benchmark $(BENCHMARK)\
$(DESIGN_LIST)\
"
# -u is needed, as the python buffers the stdout, so no output is generated
run_issue_regression:
cd $(OPENLANE_DIR) && \
$(ENV_COMMAND) sh -c "\
python3 -um tests run $(ISSUE_REGRESSION_DESIGN)"
issue_regression_all:
cd $(OPENLANE_DIR) && \
$(ENV_COMMAND) sh -c "\
python3 -um tests run_all"
.PHONY: test
test:
cd $(OPENLANE_DIR) && \
$(ENV_COMMAND) sh -c "./flow.tcl -design $(TEST_DESIGN) -tag openlane_test -overwrite"
@[ -f $(OPENLANE_DIR)/designs/$(TEST_DESIGN)/runs/openlane_test/results/signoff/$(TEST_DESIGN).gds ] && \
echo "Basic test passed" || \
echo "Basic test failed"
.PHONY: quick_run
quick_run:
cd $(OPENLANE_DIR) && \
$(ENV_COMMAND) sh -c "./flow.tcl -design $(QUICK_RUN_DESIGN)"
.PHONY: veryclean clean_runs clean_results
veryclean:
@git clean -fdX
clean_runs:
@rm -rf ./designs/*/runs && rm -rf ./_build/it_tc_logs && echo "Runs cleaned successfully." || echo "Failed to delete runs."
@rm -rf ./tests/*/runs && echo "Test runs cleaned successfully." || echo "Failed to delete test runs."
clean_results:
@{ find regression_results -mindepth 1 -maxdepth 1 -type d | grep -v benchmark | xargs rm -rf ; } && echo "Results cleaned successfully." || echo "Failed to delete results."
Correct Docker Environment to Singularity
By modified env.py in OpenLane
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
%%writefile OpenLane/env.py
#!/usr/bin/env python3
# Copyright 2021 Efabless Corporation
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# Note to maintainers/contributors:
#
# Ensure you don't use f strings, non-comment type hints or any other features
# that wouldn't work on Python 3.3
#
# Inevitably, some people won't read the Readme and then complain that the issue
# survey doesn't work on their older Python versions. As long as it's compatible
# with Python 3.3, this script will tell them that their python version is
# below the minimum supported.
import io
import os
import sys
import getpass
import textwrap
import subprocess
from os.path import abspath, dirname
openlane_dir = dirname(abspath(__file__))
is_root = os.geteuid() == 0
# Commands
def tool_list():
from dependencies.tool import Tool
tools = Tool.from_metadata_yaml(open("./dependencies/tool_metadata.yml").read())
for tool in tools.values():
print("%s %s" % (tool.name, tool.version_string))
def local_install():
from dependencies.installer import Installer
installer = Installer()
installer.run()
def docker_config():
from dependencies.env_info import ContainerInfo
cinfo = ContainerInfo.get()
if cinfo is None:
raise Exception("No container engine found.")
'''
if cinfo.engine == "docker":
if cinfo.rootless:
print("-u 0", end="")
else:
uid = (
subprocess.check_output(["id", "-u", getpass.getuser()])
.decode("utf8")
.strip()
)
gid = (
subprocess.check_output(["id", "-g", getpass.getuser()])
.decode("utf8")
.strip()
)
print("--user %s:%s" % (uid, gid), end="")
'''
def issue_survey():
sys.path.append(os.path.dirname(__file__))
from dependencies.env_info import OSInfo
from dependencies.version import parse as vp
alerts = open(os.devnull, "w")
final_report = ""
os_info = OSInfo.get()
final_report += textwrap.dedent(
"""\
Kernel: %s v%s
"""
% (os_info.kernel, os_info.kernel_version)
)
if os_info.distro is not None:
final_report += textwrap.dedent(
"""\
Distribution: %s %s
"""
% (os_info.distro, (os_info.distro_version or ""))
)
python_version = vp(os_info.python_version)
minimum_python_version = vp("3.6")
python_message = "OK"
python_ok = True
if python_version < minimum_python_version:
python_message = "BELOW MINIMUM: UPDATE PYTHON"
python_ok = False
final_report += textwrap.dedent(
"""\
Python: v%s (%s)
"""
% (python_version, python_message)
)
if os_info.container_info is not None:
container_version = vp(os_info.container_info.version)
container_message = "UNSUPPORTED"
if "docker" in os_info.container_info.engine:
container_message = "OK"
minimum_docker_version = vp("19.03.12")
if container_version < minimum_docker_version:
container_message = "BELOW MINIMUM: UPDATE DOCKER"
final_report += textwrap.dedent(
"""\
Container Engine: %s v%s (%s)
"""
% (os_info.container_info.engine, container_version, container_message)
)
elif os.path.exists(
"/git_version"
): # i.e. if running inside the OpenLane container
print("Alert: Running in container.", file=alerts)
final_report = (
textwrap.dedent(
"""\
WARNING: issue-survey appears to be running inside the OpenLane
container.
This makes it difficult to rule out issues with your
environment.
Unless instructed specifically to do so, please run this command
outside the OpenLane container.
---\n
"""
)
+ final_report
)
else:
alert = (
"Critical Alert: No Docker or Docker-compatible container engine was found."
)
final_report += "%s\n" % alert
print(alert, file=alerts)
if python_ok:
from dependencies.get_tag import get_tag
final_report += textwrap.dedent(
"""\
OpenLane Git Version: %s
"""
% get_tag()
)
pip_ok = True
try:
import pip # noqa F401
except ImportError:
pip_ok = False
alert = (
"pip: " + "INSTALLED"
if pip_ok
else "NOT FOUND: Please install pip using your operating system's package manager."
)
final_report += "%s\n" % alert
print(alert, file=alerts)
if pip_ok:
venv_ok = True
try:
import venv # noqa F401
except ImportError:
venv_ok = False
alert = (
"python-venv: " + "INSTALLED"
if venv_ok
else "NOT FOUND: Please install python-venv using your operating system's package manager."
)
final_report += "%s\n" % alert
print(alert, file=alerts)
if python_ok:
from dependencies.verify_versions import verify_versions
with io.StringIO() as f:
status = "OK"
try:
mismatches = verify_versions(
no_tools=True, report_file=f, pdk=os.getenv("PDK") or "sky130A"
)
if mismatches:
status = "MISMATCH"
except Exception:
status = "FAILED"
f.write("Failed to verify sky130A.")
f.write("\n")
final_report += "---\nPDK Version Verification Status: %s\n%s" % (
status,
f.getvalue(),
)
try:
git_log = subprocess.check_output(
[
"git",
"log",
r"--format=%h %cI %s - %an - %gs (%D)",
"-n",
"3",
]
).decode("utf8")
final_report += "---\nGit Log (Last 3 Commits)\n\n" + git_log
remotes = subprocess.check_output(["git", "remote", "-v", "show"]).decode(
"utf8"
)
final_report += "---\nGit Remotes\n\n" + remotes
except subprocess.CalledProcessError:
pass
print(final_report, end="")
# Entry Point
def main():
args = sys.argv[1:]
commands = {
"tool-list": tool_list,
"local-install": local_install,
"docker-config": docker_config,
"issue-survey": issue_survey,
}
if len(args) < 1 or args[0] not in commands.keys():
print(
"Usage: %s (%s)" % (sys.argv[0], "|".join(commands.keys())), file=sys.stderr
)
sys.exit(os.EX_USAGE)
commands[args[0]]()
if __name__ == "__main__":
main()
Step 2. Download the Docker Image and Install sky130 PDK
Download the Docker image of OpenLane and install sky130 PDK:
1
!cd OpenLane && make
Step 3: Validating your OpenLane Installation
Test the installed PDK and OpenLane:
1
!cd OpenLane && make test
Sucessful test looks like this: Basic test passed
Step 4: Run IC Physical Layout Flow
1
2
3
# Enter a Singularity session:
$ cd OpenLane && make mount
1
2
3
# inside container shell
Singularity> cd /openlane
Singularity> ./flow.tcl -design picorv32a
Step 5: View RISCV CPU tape out Layout
1
2
# still insice container shell
Singularity> klayout
open browse of klayout folder to context path of the result dependence on your system. /designs/picorv32a/runs/RUN_2022.10.13_04.40.06/results/final/gds/picorv32.gdsead215ffd805.png
1
2
# inside contain if you want to end of synthesis
Singularity> exit
1
2
3
4
5
6
7
8
9
import gdstk
import cairosvg
from IPython.display import Image
library = gdstk.read_gds('/home/snit.san/chip_design_tape_out/OpenLane/designs/picorv32a/runs/RUN_2022.10.14_10.45.33/results/final/gds/picorv32.gds')
top_cells = library.top_level()
top_cells[0].write_svg('picorv32.svg')
cairosvg.svg2png(url='picorv32.svg', write_to='picorv32.png', scale=0.08)
Image('picorv32.png')
Singularity image is shared at /shared/software/singularity/images/openlane.sif. With given container image you can modify “Makefile” to mount software for your physcial desing.
If you want to start design and simulation then it is short introduction to Verilator [7-8]
References:
OpenROAD project
https://github.com/The-OpenROAD-Project
Open Source Process Design Kit Skywave 130nm process
[https://github.com/google/skywater-pdk]
MPW
https://en.wikipedia.org/wiki/Multi-project_wafer_service
MPW university projgram
http://efabless.com
High-performance computing (HPC) for manufacturing
https://learn.microsoft.com/en-us/azure/architecture/industries/manufacturing/compute-manufacturing-overview
Picorv32
https://github.com/YosysHQ/picorv32
Verilog Primer
https://inst.eecs.berkeley.edu/~eecs151/fa21/files/verilog/Verilog_Primer_Slides.pdf
Veriator RTL somulation
https://verilator.org/guide/latest/install.html
Drawing Stick Diagrams
https://www.southampton.ac.uk/~bim/notes/cad/guides/sticks.html
1